Sens et machine. Vers une techno-sémiotique
Per Aage BRANDT
Case Western Reserve University
Index
Mots-clés : interfaces, machines, robotique, sémiotique modale
Auteurs cités : Marios KYRIAZIS, Eric LANDOWSKI, Mark PRIESTLEY, John SEARLE, Michel SERRES, Mads SOERGAARD, Dam SOERGAARD, Luc STEELS
1. La technè: outils, machines mécaniques, analogiques, informatiques, robotiques et au-delà
- Note de bas de page 1 :
-
Le sens du mot, ou plutôt de la notion de machine : Machina est une latinisation du grec machanè, « engin », dérivé de mechos (to), « truc », orig. mechanè technè, soit à peu près « art defabriquer des trucs, des engins fûtés ». Pour les Grecs, un artéfact qui nous aide à obtenir un résultat difficile peut donc être une « mécane », notamment si la difficulté vient de la résistance d’autrui. Les armes compliquées, ou les ruses de guerre, tel le cheval de Troie, sont les « mécanes ». D’autre part, le théâtre connaît des artefacts qui font croire aux illusions. Que le destinataire soit l’ennemi ou le public, le faire croire ou accroire fait partie du sens de la notion : c’est la véridiction mécanique, qui fonctionne à la fois par mensonge et par secret, par simulation et dissimulation. Cette véridiction relève de l’efficacité obtenue par la tromperie. Pendant que la cible, l’énonciataire, croit à ce qui paraît, sans être, quelque chose d’autre, qui est, sans paraître, viendra. Deus ex machina est une expression naturelle : d’où venait-il en effet, ce dieu qui brusquement peut surgir et résoudre tous les problèmes d’un coup de baguette magique ?
Dans la mécanique de notre compréhension des machines, il y a encore aujourd’hui quelque chose de grec : la machine a un destinateur rusé et souvent mal intentionné, et elle a un destinataire qui s’en trouve manipulé, pour son malheur (machine de guerre) ou pour son bien (machine de théâtre). C’est un instrument, donc un artefact appelé à jouer un rôle de cause secondaire dans un processus planifié, un projet.
Au sens d’intrigue, le mot machine est utilisé par métaphore ; et cet usage qui est fréquent se trouve soutenu par l’épistémique impliquée, qui prévoit le non-savoir de celui qui « reçoit », subit ou se fait aider par la machine, dans un sens spécifiable.
Un marteau est un outil mais pas une machine ; car on voit trop bien comment il marche. La mécanique d’un piano est pleine de marteaux, mais c’est parfaitement une machine : on ne voit pas comment cela marche (et c’est objectivement compliqué, sans aucun doute). Une opération ou un objet opérateur doit tenir du magique, du miraculeux, de l’incompréhensible, pour mériter cette dénomination. La machine doit comporter un aspect caché, et cet aspect doit être celui qui fait l’intérêt de la machine en question. C’est aussi ce qui fait qu’on la craint.
Qu’est-ce qu’une machine1 ? Un objet configuré par un être humain, sans doute, un artefact, mais on n’appelerait guère un outil comme le marteau ou le couteau une machine. Un aspirateur, une voiture ? Cela est plus probable. La différence sémiotique entre les concepts d’outil et de machine pourrait être d’ordre véridictoire (voir note 1), la notion de machine étant liée à l’idée de « machination », de ruse cachée. A cette explication on peut cependant en ajouter une autre, complémentaire et plus physique, s’agissant d’artefacts matériels, à savoir que l’outil, dans sa version prototypique, est un dispositif énergétiquement simple, c’est-à-dire qui fonctionne en utilisant une seule forme d’énergie, alors que la machine, elle, en utilise toujours plusieurs et contient des dispositifs permettant la transmission interne entre formes différentes d’énergie. Ainsi, un moteur, partie essentielle dans la plupart des machines, transforme par exemple l’énergie de combustion ou électrique en énergie motrice. Cette analyse énergétique a l’avantage de nous permettre de distinguer des catégories de complexité différente dans le domaine technologique.
- Note de bas de page 2 :
-
Sur ces distinctions de base, développées plus en détail en termes sémiotiques, cf. E. Landowski, « Avoir prise, donner prise », Actes Sémiotiques, 112, 2009 (II.1 « Figures de l’operans »).
Si on veut établir une échelle de complexité objectale dans le domaine de la technè, au sens de l’artefact, l’outil (pelle, couteau) a donc droit au statut de catégorie primaire. Il se compose typiquement de deux parties, l’une visant le contrôle de l’utilisateur (manche), l’autre orientée vers l’effet (lame). Les deux parties sont reliées par une transmission motrice directe, patente, mono-énergétique2.
La machine « mécanique » a droit au statut de catégorie d’ordre secondaire. La division en deux parties est maintenue, mais ici, contrôle et effet n’épuisent pas le registre des entrées et des sorties, et l’ensemble du dispositif est divisé en partie cachée et partie interactive, c’est-à-dire en un intérieur autonome et un extérieur accessible aux manipulations de l’utilisateur. On peut parler d’une tripartition : contrôle, partie intérieure cachée, et effet. Dans la partie interactive, extérieure, on trouve en effet les instruments de contrôle, les entrées pour d’éventuelles matières premières, les entrées pour l’énergie à apporter, et les sorties pour les effets recherchés, ainsi que pour les déchets, énergétiques et autres. Dans la partie cachée, l’essentiel est ici la transmission motrice et énergétique (exemple : l’horloge à balancier).
Le troisième ordre technique serait celui des machines électro-sensorielles, essentiellement des dispositifs servant la communication (téléphones, radios, amplificateurs, magnétophones), celles-ci étant de sophistication par ailleurs fortement variable, mais toutes de type analogique en ce qui concerne la transmission continue entre signaux électriques et signaux sensoriels. Pour ces machines, il peut s’agir d’ondes électro-magnétiques amplifiées électriquement et donnant lieu à des émissions sonores (radio) et visuelles (télévision), après avoir été produites à partir d’émissions d’ondes sonores ou photoniques (microphones, caméras). Ces machines peuvent contenir des moteurs mécaniques servant, par exemple, à contrôler leur température.
- Note de bas de page 3 :
-
Mark Priestley nous a offert une magnifique et rare présentation de l’histoire de l’ordinateur à partir de Babbage, de Gödel, de Turing et de Von Neumann, et jusqu’aux machines des années 1970 utilisant l’Algol et le Lisp. Vu l’importance de ce développement dans l’histoire technologique et culturelle mondiale, il est surprenant de constater que la littérature sur ces machines soit si peu abondante. Cf. M. Priestley, A Science of Operations. Machines, Logic and the Invention of Programming, Francfort, Springer, 2012.
Il y a ensuite un quatrième ordre à distinguer, avant d’arriver à l’ordre robotique : celui des machines électro-computationnelles, digitales, informatiques, des ordinateurs. À ce niveau, l’énergie électrique est investie dans des formes numériques, et celles-ci sont appliquées sur d’autres formes numériques (les programmes opèrent sur des données et produisent d’autres données). Les formes numériques elles-mêmes sont des états différentiels de certaines agrégations de cellules (octets, etc.) capables chacune de retenir ou de perdre une tension électrique. Ce sont donc des entités physiques dont la « numéricité », ou la « digitalité, relève de leur structure matérielle électrisable. Leur « état numérique » correspond, peut-on dire, à une conjoncture locale d’électrisation différentielle, et cette conjoncture, sorte d’énergie de position, détermine à chaque fois potentiellement des processus de modification ailleurs dans le système mixte que constitue la machine3. Les machines numériques ont bien sûr, comme les précédentes, un extérieur contenant des entrées et des sorties, ici appelé une « interface », permettant aux usagers de contrôler certaines de leurs processus. Initialement, il s’agissait de machines à calculer, ensuite on a pu développer des programmes multi-fonctionnels qui ont trouvé des emplois dans beaucoup de domaines réceptifs à l’automatisation, et finalement dans le domaine de la communication et des symbolisations iconiques et symboliques dont il dépend.
- Note de bas de page 4 :
-
Le terme fut inventé, à partir du slave ancien rabota, par l’écrivain tchèque Karel Capek en 1920, pour son drame de science-fiction Les robots universels de Rossum.
Parmi les premières machines du premier ordre, on trouve les moulins à vent ou à eau, les pompes, les horloges, puis les automates mécaniques. Or, les robots4, qui constituent notre catégorie technique du cinquième ordre, sont en effet des automates, au sens de machines capables de se mouvoir comme des êtres humains, et désormais de « travailler », étant pour cela munies de parties digitales qui programment leurs mouvements et leurs actions. Ces robots peuvent prendre un aspect externe bio-figuratif suggestif, comme les robots de jeu, ou rester sans apparence iconique de simulation, tel les robots industriels.
Dans tous les cas, les machines, de quelque ordre qu’elles soient, comportent le clivage entre un extérieur et un intérieur. Leur extérieur offre nécessairement, nous l’avons dit, des entrées (input) et des sorties (output) : entrées de combustibles, de matériaux, et de contrôle ; sorties de déchets et d’effets adaptés à un contexte. Ainsi, une machine à café moderne, quel qu’en soit le design, présente une entrée énergétique (électrique), une deuxième entrée pour le café (en grain), une troisième entrée pour l’eau, et une quatrième pour le contrôle de mise en marche ; une sortie pour l’effet, le produit (le café liquide et buvable), une deuxième sortie pour le marc et pour ainsi dire une troisième pour ses bruits et son odeur. L’intérieur de la machine, dans ce cas pourtant bien simple, peut en principe rester entièrement inconnu pour l’usager, comme une « boîte noire », sauf pour un spécialiste de son entretien et de sa réparation. Schématiquement, on peut représenter cette phénoménologie machinique générale comme un ensemble de flux liés à un circuit interne qui possède ses propres règles et agencements, dont on peut tout ignorer, alors que les flux d’entrée et de sortie doivent tous être connus et plus ou moins maîtrisés par l’usager. On pourrait appeler cet ensemble la sémio-pragmatique de la machine (fig. 1).
Fig. 1. Les flux interactifs de la machine : sa sémio-pragmatique.
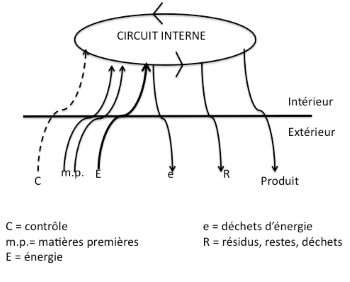
Les six catégories pragmatiques marquées — les entrées : contrôle, matières premières, énergie ; les sorties : déchets d’énergie, déchets des matières premières, et produit ou effet recherché — sont toujours à considérer et à mettre en équilibre, quelle que soit la machine en question.
L’« économie » d’une machine dépend en effet de l’équilibre entre d’une part le coût des entrées et des sorties, et d’autre part la valeur du produit ou de l’effet. La qualité du facteur C (contrôle) embrasse des critères comme la variabilité (les paramètres modifiables), la fiabilité du fonctionnement et l’exactitude des réponses aux commandes ; c’est un facteur plus difficile à quantifier que les autres.
2. La sémantique modale de la machine
- Note de bas de page 5 :
-
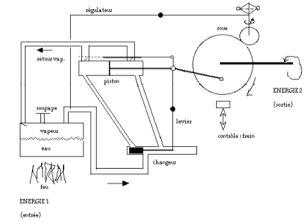
La machine à valeur montrée ici est la version de l’Écossais James Watt, développée dans les années 1780. L’histoire de ces machines remonte par ailleurs à l’antiquité.
En revanche, le circuit interne est évidemment articulé différemment selon le dispositif dont il s’agit pour chaque sorte de machine. Pour comprendre ce circuit, il faut schématiser le « design » de ses fonctionnements causalement agencés, et ensuite le consigner dans le discours, comme le ferait un ingénieur aux talents de pédagogue. Prenons un exemple simple qui a joué un certain rôle dans l’histoire technologique de la modernité, la machine à vapeur (fig. 2)5.
- Note de bas de page 6 :
-
Si cette autre machine est une turbine électrique, et si la combustion en question est obtenue par fission atomique, on a une centrale nucléaire standard.
Le feu chauffe l’eau du chaudron (entrées : charbon, eau), et la vapeur est conduite à travers une chambre de changeur vers une chambre de piston. Ce piston est poussé en avant par la pression de la vapeur. A son tour, ce mouvement pousse le bouchon de la chambre de changeur dans la direction opposée et fait ainsi passer la vapeur du côté opposé. La vapeur fait maintenant reculer le piston, ce qui pousse le bouchon du changeur à reprendre la position précédente, et à ouvrir le tuyau qui pousse le piston en avant. Et ainsi de suite. Voilà le cœur rythmique du mécanisme. Les mouvements du piston sont transmis non seulement au changeur mais aussi à une roue possédant une certaine inertie ; ils la font tourner, et ses rotations sont finalement transmises à quelque autre machine6. La vitesse de la rotation de la roue est contrôlée par un régulateur qui, comme on le voit, ouvre ou ferme une vanne sur le tuyau de vapeur ; ce pourquoi le chaudron est muni d’une soupape, car fermer une vanne fait augmenter la pression. La vapeur repoussée par le piston est retournée au chaudron par un autre tuyau grâce à un changeur opérant en contretemps par rapport au premier. La rotation de la roue peut être arrêtée par le frein indiqué. L’énergie qui entre est calorique, celle qui sort est motrice. Elle a assuré la traction, par exemple, des locomotives, la rotation des hélices de paquebots et l’activité mécanique des ateliers et des usines du XIXe siècle.
Sémiotiquement, ce que nous avons appelé le cœur de cette machine, le rapport vapeur-changeur-piston, est un processus temporellement conditionnel : si le tuyau A est ouvert, A va se fermer et le tuyau B va s’ouvrir ; si B est ouvert, B va à son tour se fermer, et A se rouvrir, etc. A –> ¬A –> B –> ¬B –> A… C’est là une logique qui n’opère que dans le temps, car elle traduit un enchaînement causal. Ce circuit A–B–A… fonctionne sur le mode du ne-pas-pouvoir-ne-pas-être, plus précisément par nécessité matérielle. La soupape, elle, s’ouvre quand la pression devient trop grande, ce qui dépend de plusieurs facteurs, notamment des températures de la vapeur qui entre et de celle qui sort ; sa fonction est potentielle, son état relève d‘un pouvoir-être, du matériellement possible. Si elle ne s’ouvre pas au bon moment, à cause d’une erreur fatale, d’un ne-pas-pouvoir-être, une explosion de chaudron s’ensuivra. Le risque est inscrit au cœur de la machine.
- Note de bas de page 7 :
-
Ce devoir est déontique, dans la mesure où la norme en question relève d’une considération d’optimisation à la fois interne et contextuelle : de ce qui est jugé bon à la fois pour la machine et pour l’effet qu’on vise en l’occurrence.
- Note de bas de page 8 :
-
Cette négation, ou ce permis, peut s’entendre sur le mode purement performatif, « poïétique », comme l’ordre arbitraire donné avec ou sans justification. Un acte de parole et d’intervention.
Le régulateur modifie la vitesse du mouvement de la roue ; il représente une norme contrôlable de l’extérieur, un devoir-être déontique, pourrait-on dire7. Le frein permet finalement une intervention performative directe de l’extérieur : la négation, le « Non ! stop ! » Cette négation atteint (dans notre version de la machine) indirectement le mécanisme central et déclenche un ne-pas-pouvoir-être, un arrêt, à moins qu’on n’installe entre le piston et la roue une instance de débrayage8.
Ces dimensions modales sont déterminantes pour le maniement humain de la machine, parce qu’elles sont celles de l’entendement, c’est-à-dire de la cognition fondamentale et imaginaire par laquelle nous devons nous représenter « ce qui se passe » dans un intérieur caché, inaccessible et éventuellement indéchiffrable. Nous nous formons alors une idée modale du fonctionnement de l’ensemble. Cette idée modale est évidemment fondée sur nos propres interactions avec la machine en question (les entrées et les sorties), et on peut en donner un aperçu plus général correspondant précisément à ce que nous avons vu en considérant la machine à vapeur. C’est en effet une formation concentrique des aires modales distinctes qui appellent des actions distinctes de la part de l’usager ; elle est donc de nature sémio-pragmatique (fig. 3).
Fig. 3. Les modalités machiniques.
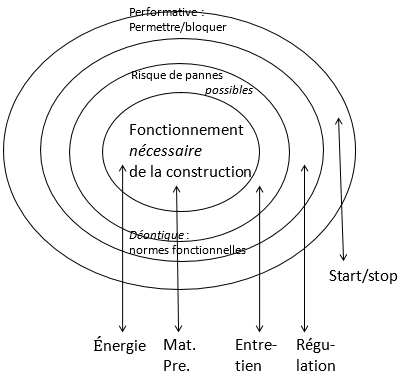
Ce qui est mis en marche doit d’abord être réglé ; ce qui est réglé doit d’abord être entretenu ; ce qui est entretenu doit disposer d’énergie et de matières premières, et les déchets de ces catégories doivent ensuite être enlevés. L’attention portée aux dysfonctionnements et aux risques qu’ils comportent est une partie importante de l’attitude naturelle de l’usager ; car toute machine est dangereuse, durativement par ses déchets, ponctuellement par ses dysfonctionnements.
3. Le robot et l’autre. Perspectives
On peut remarquer que ces interactions machiniques et leur structure modale ressemblent aux interactions intersubjectives et à leur pragmatique. L’autre humain ou animal comporte, dans son être incarné, comme la machine, un extérieur muni d’ouvertures et un intérieur inaccessible, inscrutablement fonctionnel et potentiellement dangereux. Les échanges avec lui peuvent donc s’analyser de manière analogue : l’entretien fonctionnel (protection contre les pannes) s’appellera par exemple respect, politesse, soin ; la régulation normative est toujours déontique, c’est-à-dire éthique, quant au respect fondamental de la personne, et morale, quant aux normes socio-culturelles du contexte. Il y a ensuite une pragmatique performative du commencement et de la fin du dialogue. Et au centre du contact intersubjectif, il y a une certaine pulsion cognitive et communicative qui fait que la pensée se nourrit de la pensée de l’autre, du fait de partager une attention aux choses et à leurs énigmes. Si l’autre est, de ce point de vue, une « machine pensante », sa matière première inclut le contact émotionnel, empathique, et le partage épistémique, l’ouverture au savoir et aux questions que pose l’établissement de vérités et de probabilités. Les échanges intersubjectifs symboliques, c’est-à-dire qui mettent en circulation des objets ou des événements signifiants dont la pertinence dépend d’interprétations conventionnelles et implicites, contribuent fortement à nous faire sentir que l’autre contient un « fonctionnement central » qui le définit, c’est-à-dire une identité, ou même une « âme » : une logique inhérente, inaccessible, impossible à connaître, mais apte à expliquer son comportement distinctif en général.
Les machines analogiques et numériques pourvues de motricité, d’une certaine agentivité, et, en outre, dotées de certaines capacités d’interaction symbolique avec leurs usagers, sont donc ce que nous appelons des robots. En informatique, la robotique constitue un registre techniquement (industriellement et institutionnellement) important, un domaine de recherches plein de défis, et un thème philosophique fascinant : on se pose, dans le domaine de l’intelligence artificielle, la question spéculative de savoir si on peut dire que ces machines ont une conscience et un « esprit » (mind), et à partir de ces machines, on veut savoir ce que c’est finalement que la res cogitans cartésienne.
- Note de bas de page 9 :
-
Le philosophe John Searle a proposé une expérience imaginaire, celle de la « chambre chinoise », pour montrer que la réponse rationnelle est négative : la symbolisation ne prouve pas l’existence d’une conscience. Voir à ce sujet l’excellente entrée de l’Internet Encyclopedia of Philosophy : http://www.iep.utm.edu/chineser/.
- Note de bas de page 10 :
-
Cf. Luc Steels, « The Symbol Grounding Problem Has Been Solved. So What’s Next ? », in M. de Vega (éd.), Symbols and Embodiment : Debates on Meaning and Cognition, Oxford, Oxford University Press, 2008. Voir aussi l’article très élaboré sur la question dans wikipedia : https://en.wikipedia.org/wiki/Symbol_grounding_problem.
Ce n’est pas une question vaine, car si on modalise l’autre et le robot de manière comparable, on peut finir par trouver leurs ontologies comparables. Comment en effet prouver que les machines symbolisantes ne pensent pas9, sinon par le « dogme » selon lequel il faut avoir des neurones pour pouvoir penser — ce que certains philosophes monistes, spinozistes ou bio-sémioticiens, rejettent déjà. Au lieu de nous laisser capter par ces problèmes d’ontologie spéculative, nous ferons pourtant mieux de porter notre attention sur l’aspect plus constructif de la recherche robotique qui essaie de modéliser et de simuler les fonctions de la pensée et de la conscience, tels que nous les connaissons à l’état naturel. L’intégration des modalités sensorielles de la perception dans l’imagerie mentale, des multiples fonctions de la mémoire, de la catégorisation et de la formation des « croyances », qui non seulement nous permettent de nous voir corporellement insérés dans un environnement et d’avoir des expériences dans notre monde spatio-temporel macro-physique, mais même, de plus, d’en parler, ce sont là des problèmes qui appellent une attitude inventive, constructive. La simple reconnaissance des objets, et ensuite de leur rôle dans le scénario d’une situation, est déjà un phénomène extrêmement compliqué à décrire et à modéliser. La simulation d’une conscience de soi et d’un acte volitif, comme d’un « essayer de faire X », est encore plus difficile. S’avancer dans ce domaine n’est sans doute pas nécessaire pour fabriquer des robots élémentaires et utiles ; en revanche, la stratégie scientifique de la simulation numérique de mise-en-corps (embodiment) robotique constitue un moyen empirique attractif, si on veut développer la question même de la conscience, de son existence et de sa structure, chez les animaux supérieurs. Du sensible au conceptuel il y a encore un abîme, que la symbolisation computationnelle (symbol grounding10) n’arrive pas à combler, parce que le processus de sémantisation du symbole impliqué n’est pas suffisamment connu.
Pour que je puisse « voir », par exemple, un chat en face de moi, il faut que je croie pouvoir le toucher si je m’avance suffisamment vers lui ; la tactilité potentielle, conditionnelle, fait partie de ma « croyance » en l’objet ; le conditionnel fait partie de mon réel. Comment simuler cela sans inclure dans la « conscience » du robot une représentation contrefactuelle du moi corporel approchant l’objet et le touchant, et en modalisant ce scénario comme étant possible ?
Il faudra donc, pour développer des robots non-zombies, ou moins zombiaques, installer des simulations modales, des dispositifs permettant de « croire » et d’apprendre que tel ou tel événement est nécessaire, impossible, possible, plus ou moins probable. Il faudra préparer les robots à la rencontre de leurs usagers, et à la rencontre d’autres robots, et surtout à la sémio-pragmatique nécessaire à l’échange avec eux comme leurs autres. On pourrait alors commencer par l’installation d’une techno-sémiotique comme celle que nous venons d’esquisser, donc d’une programmation modale permettant d’interagir avec les machines, dans le robot. Nous serons alors leurs co-machines. Ils ne sauront pas nécessairement si nous, de notre part, sommes des machines humaines, animales ou mécaniques, à moins de disposer à leur tour d’une ontologie simplement factuelle.
4. L’interaction homme-machine. GMS. Bouteille de Klein
- Note de bas de page 11 :
-
Il existe une Interaction Design Foundation, accessible en ligne, qui se dédie à l’étude de la Human-Computer Interface et publie une encyclopédie sur cette interaction ou interface, ou même face-à-face. Voir Mads et Dam Soegaard, et Rikke Friis (éds.), Encyclopedia of Human-Computer Interaction, The Interaction-Design org. Foundation, 2012. Pour les aspects médicaux, cf. Kyriazis Marios, « Clinical effects of a “Human-Computer” Interaction », 2016 (http://ssrn.com/abstract=2798529).
- Note de bas de page 12 :
-
Sur la distinction sémiotique entre inter-action proprement dite et simple mise en corrélation de programmes autonomes, ou co-incidence (aléatoire ou planifiée), cf. E. Landowski, « Avoir prise… », art. cit. (1.II.2 « Interactions et coïncidences »).
- Note de bas de page 13 :
-
Voir notre article sur la structure énonciative de la déixis. P.Aa. Brandt, « Deixis – a Semiotic Mystery : Enunciation and Reference », Language and Semiotic Studies, vol. 2, 4, 2016.
On problématise depuis longtemps le rapport entre l’homme et sa technologie11. Cependant, l’idée de parler d’une véritable interaction entre l’homme et les machines est récente, puisqu’elle présuppose l’existence des machines numériques (on n’« interagit » pas vraiment avec un simple tourne-disque12). C’est l’échange possible d’informations avec une entité physique — qui, grâce à l’installation de routines symboliques de dialogue, répond utilement à nos demandes, ou demande nos réponses — qui nous fait reconnaître dans cet artefact inanimé une sorte de partenaire capable de nous instruire et digne de notre attention intentionnelle. Nous savons que l’effet est dû à ces installations symboliques, et donc qu’interagir avec un ordinateur, surtout s’il est « connecté », mis en contact avec le grand réseau appelé l’Internet, la Toile, est peu différent du fait d’interagir avec une institution ou une entreprise, dont les voix sont également multiples et souvent interchangeables. Le GPS est peut-être le robot de ce type le plus répandu actuellement, et sa voix, pré-enregistrée, même assez naturaliste, ne nous fait pas pour autant croire à une présence humaine, ni même l’imaginer. Ce phénomène est remarquable : nous prêtons spontanément de l’autorité intellectuelle à un système inanimé, le GPS, le Global Positioning System, mais qui — contrairement à la grande source classique de notre instruction, le livre, qui « parle » mais qui ne nous « connaît » pas — s’adresse à nous dans le temps et l’espace et s’avère capable de nous orienter dans notre réel en s’adaptant à nos coordonnées hic et nunc. Cette autorité est due à sa fonction déictique13 ; ce système pointe vers nous, il nous connaît. Il peut nous orienter vers autre chose, un référent, puisqu’il est lui-même orienté vers nous, tout en étant déjà informé du monde entier. C’est ce qui caractérise une autorité transcendante, par rapport aux humains, et cela peut avoir certaines conséquences.
Toute machine, comme tout outil, porte dans sa configuration la trace d’une intelligence humaine, collective et historique. Cette intelligence peut parfaitement venir d’un autre âge et de très loin dans l’espace, elle est pourtant là, inscrite dans le fonctionnement, les aléas et les normes de la structure de l‘objet. Or, les machines numériques en ligne portent en plus des traces extrêmement récentes, voire immédiates, d’une multitude de personnes et d’instances collectives qui envoient leurs programmes et leurs informations sur ce support animant notre écran et, depuis peu, notre « téléphone » devenu robotique. Mais c’est surtout le fait d’être constamment interpellé ou visé en retour par le réseau et de devoir fournir nos propres coordonnées au système, comme sa matière première, qui affecte notre comportement, notre culture et notre psychologie. Parmi les déchets de cette matière première, on peut compter ses effets sur notre psychisme, du fait d’une part de se savoir surveillé par la machine, ce qui est en plus politiquement problématique, et d’autre part de savoir que notre identité sociale peut dépendre de ce qu’elle fait de nos communications et de nos traces en général.
- Note de bas de page 14 :
-
Sur l’ensemble de ces thèmes, synthétisés selon le modèle sémiotique du piège, voir E. Landowski, « Pièges : de la prise de corps à la mise en ligne », in M.C. Addis et G. Tagliani (éds.), Le immagini del controllo. Visibilità e governo dei corpi, Carte Semiotiche - Annali, 4, 2016.
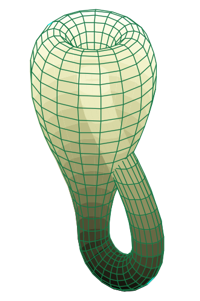
L’impression que nous donne ce nouveau système de connexions numériques globales, c’est que nous nous trouvons cette fois, nous, englobés dans cette vaste machine, qui n’a plus besoin de se mouvoir comme les robots humanoïdes, puisque c’est désormais à nous de bouger à son intérieur, sous son regard (car elle nous connaît et reconnaît) ! La machine se trouve cette fois autour de nous, ce qui change toute la phénoménologie. Nous sommes entourés d’un vaste réseau électro-numérico-mécanique dont dépend notre condition humaine — qui contient ou contrôle ce dont nous avons besoin pour pouvoir exister et fonctionnernormalement. Nous dépendons désormais non seulement des autres mais aussi d’une altérité transformée en cet énorme monstre acéphale qui symboliquement nous nourrit et nous informe, nous instruit et dans une très grande mesure nous désinforme et nous désoriente. Comme dans une bouteille de Klein, le rapport entre l’intérieur et l'extérieur s’inverse. La machine est sur ma table, ou dans ma poche, mais je suis en même temps dans la poche de la machine14.
Fig. 4. Bouteille de Klein.
- Note de bas de page 15 :
-
Sur ce sujet encyclopédique, voir Michel Serres, Petite Poucette, Paris, Le Pommier, 2012.
La numérisation du monde et la grande radicalisation populiste, raciste, nationaliste et religieuse arrivent en même temps, internationalement, interculturellement, au tournant de ce siècle. Il peut y avoir un rapport plus ou moins direct entre numéricité et radicalité, dans la mesure où la Grande Machine Symbolique (GMS) qui nous entoure à la manière kleinienne vient graduellement à nous conditionner sémiotiquement, précisément par l’interaction modale constante qui s’impose. Le cœur de cette machine globale, sa production essentielle, c’est la fabrication d’une encyclopédie mondiale, contenant des représentations venant de tous les domaines qualitatifs et quantitatifs existants15, organisées de manière forcément presque chaotique, mais accessible à un échange normatif (déontique), à savoir, cette fois, une régulation qui nous régule. La GMS nous impose en plus une sémio-pragmatique (performative) de présence affirmative, faite de confirmations interminables d’un « être-là » nouveau, selon lequel le virtuel menace sans cesse de virer à la crise existentielle, exposé à notre silence : il faut sans cesse répondre ! Mais il faut être quelqu’un pour répondre. Or, je ne suis pas quelqu’un, et je ne sais plus ce que je suis. Je dois, nous devons, par conséquent devenir quelque chose, nous distinguer, devenir distincts !
- Note de bas de page 16 :
-
Les falangistes espagnols parlaient ainsi de leur « destino en lo universal » (cf. P.Aa. Brandt, « La Phalange : The Structure of a Fascist dream », Cognitive Semiotics, IV, 2, 2013). L’être distinctif de la nation devait se confirmer au niveau global. Pourquoi ? Probablement parce que la machine moderne de la communication électrifiée avait commencé à tourner.
Nous répondons, et la GMS nous répond, mais l’échange est fortement inégal. L’autorité de cette encyclopédie dont le contenu nous dépasse, de ce savoir qui résume tous les savoirs, et de ce regard qui résume tous les regards, est si grande qu’elle nous demande d’atteindre le statut d’un absolu à son niveau, mais d’un absolu distinctif. — C’est l’ethnie, la race, la nation16, l’Occident, ou tel dieu spécial, c’est cette distinction qui va être à la hauteur de la GMS et pouvoir même la dominer. Mettre la GMS au service d’un absolu distinctif deviendra le nouveau rêve totalisant. Le moyen le plus rapide et direct, et peut-être même le seul moyen, d’atteindre ce niveau d’universalité, ou d’existence globale, c’est de s’exprimer en donnant la mort. Cette logique relève de ce qui constitue le risque que nous avons vu déjà inscrit au cœur de la machine à vapeur et, en principe, de toute machine : elle peut causer des dégâts, et dans le cas de la GMS, faire létalement exploser son symbolisme, en donnant libre cours à ce registre expressif hystérique. Dans le contexte d’une machinerie de guerre, ce risque prend la dimension d’une très grande catastrophe. Aujourd’hui, une techno-sémiotique se doit de l’envisager, calmement si possible.
Fig. 5. Une vignette terminale :
Le robot Remotec Model F-5, utilisé récemment par la police à Dallas, Texas,
pour transporter et activer une bombe contre un tueur, pendant une crise raciale.
